Hey HN! Myself and my cofounder are excited to actually launch the product we've been working for the past six months. It's a robotics framework with a focus on testing and production. The current industry standard (ROS) is great for prototyping, but suffers from performance and testing problems as the robot gets more complex. I would have loved to work on this another six months or a year to polish it up and really, but I know it's better to launch a bit before you think you're ready.
It's a C++ pub-sub framework (a lot like ROS, in that way), but rather than declaring C++ publishers/subscribers directly, you declare the topics and types your code cares about in a configuration file, along with conditions on those inputs. Doing this allows for deep knowledge about the code running, which unlocks the possibility of deterministic simulation and testing (along with making it easy to generate bindings for other languages, create alternate schedulers, more easily swap out internal concepts, etc). It also enables easy static analysis of the codebase - given a launch file and arguments to the launch file, one can analyze the topic network and find missing publishers or publishers that publish to nothing.
Comments URL: https://news.ycombinator.com/item?id=41976368
Points: 16
# Comments: 0
Login to add comment
Other posts in this group

Article URL: https://alhassy.com/TypedLisp.html
Comments URL: https://news.ycombinat
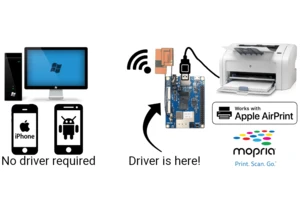
This is a device, to which you connect your older USB printer, and use it from any PC or smartphone without installing drivers (AirPrint/Mopria), wirelessly. As easy as that!
* Supp

Been going to a bunch of hackathons in SF lately and honestly, everything feels fake. There are like 20 sponsors handing out credits for their tools that all do the same thing. Half the time, they



Article URL: https://owentrueblood.com/blog/2025/05/04/helmdar/